

Update README.md
Browse files
README.md
CHANGED
|
@@ -1,3 +1,87 @@
|
|
| 1 |
-
---
|
| 2 |
-
|
| 3 |
-
-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
---
|
| 2 |
+
language:
|
| 3 |
+
- en
|
| 4 |
+
license: cc-by-nc-sa-4.0
|
| 5 |
+
pipeline_tag: other
|
| 6 |
+
tags:
|
| 7 |
+
- motion-generation
|
| 8 |
+
- trajectory-prediction
|
| 9 |
+
- robotics
|
| 10 |
+
- computer-vision
|
| 11 |
+
- pytorch
|
| 12 |
+
- torch-hub
|
| 13 |
+
---
|
| 14 |
+
|
| 15 |
+
# ZipMo (Learning Long-term Motion Embeddings for Efficient Kinematics Generation)
|
| 16 |
+
|
| 17 |
+
[](https://compvis.github.io/long-term-motion)
|
| 18 |
+
[](https://arxiv.org/)
|
| 19 |
+
[](https://github.com/CompVis/long-term-motion)
|
| 20 |
+
[](https://compvis.github.io/long-term-motion)
|
| 21 |
+
|
| 22 |
+
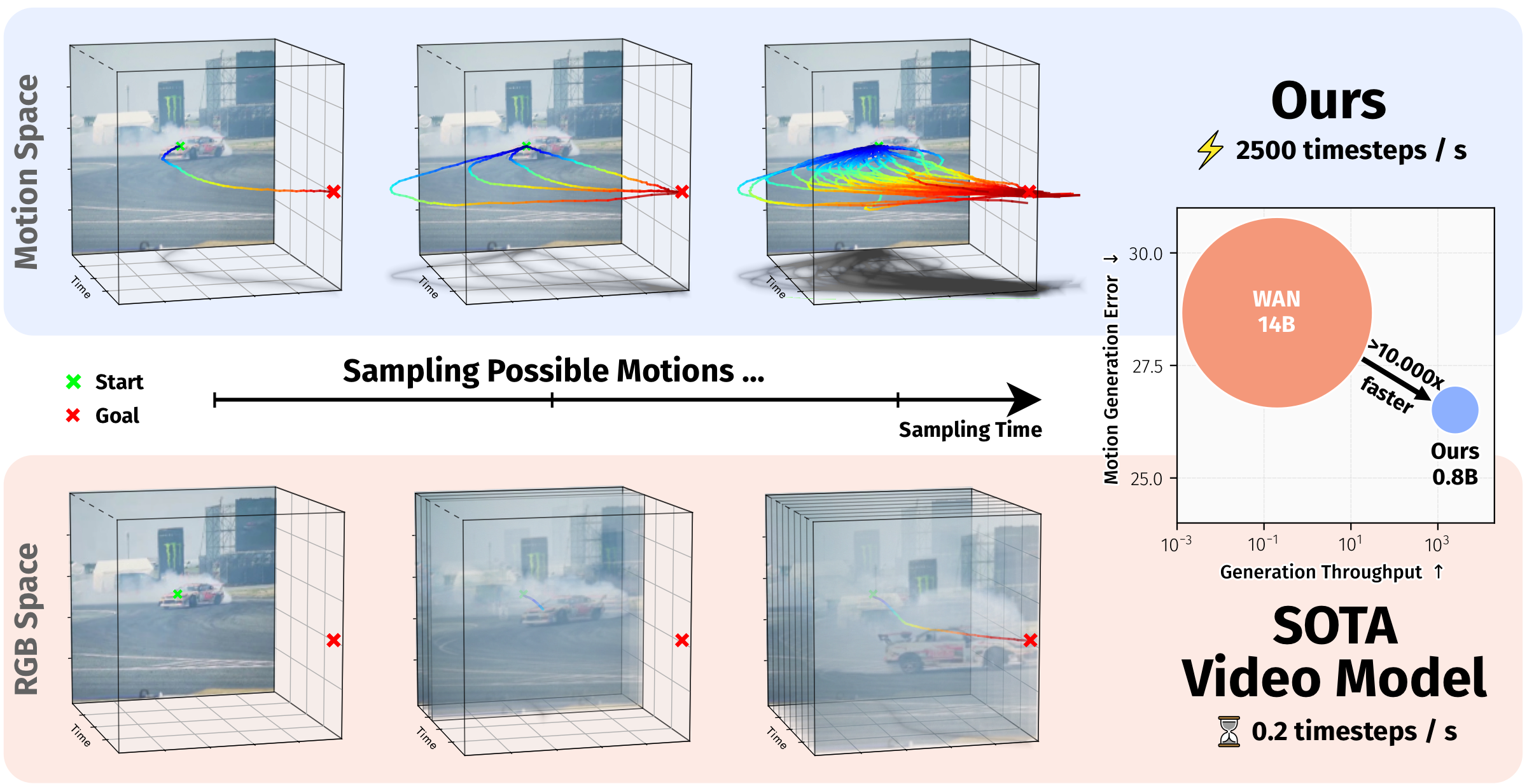
ZipMo is a motion-space model for efficient long-horizon kinematics generation. It learns compact long-term motion embeddings from large-scale tracker-derived trajectories and generates plausible future motion directly in this learned motion space. The model supports spatial-poke conditioning for open-domain videos and task/text-embedding conditioning for LIBERO robotics evaluation.
|
| 23 |
+
|
| 24 |
+
## Paper and Abstract
|
| 25 |
+
|
| 26 |
+
ZipMo was introduced in the CVPR 2026 paper **Learning Long-term Motion Embeddings for Efficient Kinematics Generation**.
|
| 27 |
+
|
| 28 |
+
Understanding and predicting motion is a fundamental component of visual intelligence. Although video models can synthesize scene dynamics, exploring many possible futures through full video generation is expensive. ZipMo instead operates directly on long-term motion embeddings learned from tracker trajectories, enabling efficient generation of long, realistic motions while preserving dense reconstruction at arbitrary spatial query points.
|
| 29 |
+
|
| 30 |
+
|
| 31 |
+
*ZipMo generates long-horizon motion in a compact learned motion space, supporting spatial-poke conditioning for open-domain videos and task-conditioned action prediction on LIBERO.*
|
| 32 |
+
|
| 33 |
+
## Usage
|
| 34 |
+
|
| 35 |
+
For programmatic use, the simplest way to use ZipMo is via `torch.hub`:
|
| 36 |
+
|
| 37 |
+
```python
|
| 38 |
+
import torch
|
| 39 |
+
|
| 40 |
+
repo = "CompVis/long-term-motion"
|
| 41 |
+
|
| 42 |
+
# Open-domain motion prediction
|
| 43 |
+
planner_sparse = torch.hub.load(repo, "zipmo_planner_sparse")
|
| 44 |
+
planner_dense = torch.hub.load(repo, "zipmo_planner_dense")
|
| 45 |
+
|
| 46 |
+
# Motion autoencoder
|
| 47 |
+
vae = torch.hub.load(repo, "zipmo_vae")
|
| 48 |
+
```
|
| 49 |
+
|
| 50 |
+
LIBERO planning and policy components can be loaded in the same way:
|
| 51 |
+
|
| 52 |
+
```python
|
| 53 |
+
import torch
|
| 54 |
+
|
| 55 |
+
repo = "CompVis/long-term-motion"
|
| 56 |
+
|
| 57 |
+
# LIBERO planners
|
| 58 |
+
libero_atm_planner = torch.hub.load(repo, "zipmo_planner_libero", "atm")
|
| 59 |
+
libero_tramoe_planner = torch.hub.load(repo, "zipmo_planner_libero", "tramoe")
|
| 60 |
+
|
| 61 |
+
# LIBERO policy heads
|
| 62 |
+
policy_head_atm = torch.hub.load(repo, "zipmo_policy_head", "atm")
|
| 63 |
+
policy_head_tramoe_goal = torch.hub.load(repo, "zipmo_policy_head", "tramoe", "goal")
|
| 64 |
+
```
|
| 65 |
+
|
| 66 |
+
Available Torch Hub entries:
|
| 67 |
+
|
| 68 |
+
- `zipmo_planner_sparse`: sparse-poke planner for open-domain motion prediction.
|
| 69 |
+
- `zipmo_planner_dense`: dense-conditioning planner for open-domain motion prediction.
|
| 70 |
+
- `zipmo_vae`: long-term motion autoencoder.
|
| 71 |
+
- `zipmo_planner_libero`: LIBERO planner with mode `atm` or `tramoe`.
|
| 72 |
+
- `zipmo_policy_head`: LIBERO policy head with mode `atm` or `tramoe`. For `tramoe`, pass one of `10`, `goal`, `object`, or `spatial`.
|
| 73 |
+
|
| 74 |
+
For the interactive demo, standard track prediction evaluation, LIBERO rollout evaluation, and training instructions, see the [GitHub repository](https://github.com/CompVis/long-term-motion).
|
| 75 |
+
|
| 76 |
+
## Citation
|
| 77 |
+
|
| 78 |
+
If you find our model or code useful, please cite our paper:
|
| 79 |
+
|
| 80 |
+
```bibtex
|
| 81 |
+
@inproceedings{stracke2026motionembeddings,
|
| 82 |
+
title = {Learning Long-term Motion Embeddings for Efficient Kinematics Generation},
|
| 83 |
+
author = {Stracke, Nick and Bauer, Kolja and Baumann, Stefan Andreas and Bautista, Miguel Angel and Susskind, Josh and Ommer, Bj{\"o}rn},
|
| 84 |
+
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
|
| 85 |
+
year = {2026}
|
| 86 |
+
}
|
| 87 |
+
```
|