---
license: apache-2.0
library_name: pytorch
pipeline_tag: object-detection
tags:
- object-detection
- instance-segmentation
- real-time
- detection-transformer
- d-fine
- tensorrt
- openvino
datasets:
- visdrone
- taco
- coco
language:
- en
model-index:
- name: D-FINE-seg S (TACO, instance segmentation)
results:
- task:
type: instance-segmentation
name: Instance Segmentation
dataset:
name: TACO
type: taco
metrics:
- type: f1
value: 0.281
name: F1@IoU=0.5
- type: latency
value: 3.7
name: Latency (ms, RTX 5070 Ti, TRT FP16, 640x640)
- name: D-FINE S (VisDrone, object detection)
results:
- task:
type: object-detection
name: Object Detection
dataset:
name: VisDrone
type: visdrone
metrics:
- type: f1
value: 0.584
name: F1@IoU=0.5
- type: latency
value: 2.1
name: Latency (ms, RTX 5070 Ti, TRT FP16, 640x640)
---
# D-FINE-seg
**Real-Time Object Detection and Instance Segmentation.**
A DETR-style detector ([D-FINE](https://arxiv.org/abs/2410.13842)) extended with a lightweight
mask head, segmentation-aware training, and mask-aware Hungarian matching. Outperforms
Ultralytics YOLO26 in fine-tuning F1-score on TACO and VisDrone under a unified TensorRT FP16
end-to-end benchmarking protocol, while maintaining competitive latency.
- 📄 **Paper:** [arXiv:2602.23043](https://arxiv.org/abs/2602.23043)
- 💻 **Code:** [github.com/ArgoHA/D-FINE-seg](https://github.com/ArgoHA/D-FINE-seg)
- 🎬 **Video tutorial:** [YouTube](https://youtu.be/_uEyRRw4miY)
- 🧪 **Colab:** [Open in Colab](https://colab.research.google.com/drive/1ZV12qnUQMpC0g3j-0G-tYhmmdM98a41X?usp=sharing)
- 🪪 **License:** Apache 2.0
## Model description
D-FINE-seg adds an instance segmentation head to D-FINE without changing its detection core.
The mask head fuses HybridEncoder PAN features at strides 8/16/32 to 1/4 resolution; per-query
mask embeddings (3-layer MLP) are dot-producted with shared mask features to produce per-instance
masks. Training adds box-cropped BCE + Dice mask losses, mask-aware contrastive denoising,
and mask costs in the Hungarian matcher.
This is **not** a fork of D-FINE. The detection core is based on the
[original D-FINE paper](https://github.com/Peterande/D-FINE); everything else
(segmentation head, training pipeline, export, inference, augmentations) was reimplemented
from scratch. The mask head design follows the [Mask DINO](https://arxiv.org/abs/2206.02777) paradigm.
## Available checkpoints
All weights are PyTorch `.pt` files. Filename pattern: `dfine[_seg]__.pt`.
### Object detection (COCO-pretrained)
| File | Size (M params) | Notes |
|---|---|---|
| `dfine_n_coco.pt` | 3.8 | Nano |
| `dfine_s_coco.pt` | 10.3 | Small |
| `dfine_m_coco.pt` | 19.6 | Medium |
| `dfine_l_coco.pt` | 31.2 | Large |
| `dfine_x_coco.pt` | 62.6 | Extra-Large |
### Object detection (Objects365 → COCO)
`dfine_{s,m,l,x}_obj2coco.pt` — same architectures, pretrained on Objects365, then fine-tuned
on COCO. Generally a stronger init for downstream fine-tuning.
### Instance segmentation (COCO-pretrained)
| File | Size (M params) | Notes |
|---|---|---|
| `dfine_seg_n_coco.pt` | 5.1 | Nano |
| `dfine_seg_s_coco.pt` | 11.9 | Small |
| `dfine_seg_m_coco.pt` | 21.2 | Medium |
| `dfine_seg_l_coco.pt` | 32.8 | Large |
| `dfine_seg_x_coco.pt` | 64.3 | Extra-Large |
## Usage
> **Note on `transformers` integration.** This model is not (yet) wrapped as a
> `transformers.AutoModel`. The recommended path is to use the official
> [training/inference repo](https://github.com/ArgoHA/D-FINE-seg) — weights auto-download
> from this Hub repo on first use. For an `AutoModel`-style API on a closely related
> architecture, see [`RTDetrV2ForObjectDetection`](https://huggingface.co/docs/transformers/model_doc/rt_detr_v2).
### Option 1 — Official repo (recommended)
```bash
git clone https://github.com/ArgoHA/D-FINE-seg.git
cd D-FINE-seg
pip install -r requirements.txt
```
Weights are auto-downloaded from this repo into `pretrained/` on first use. No manual setup
needed; just point at the size and dataset you want:
```python
from src.infer.torch_model import Torch_model
import cv2
model = Torch_model(
model_name="s", # n / s / m / l / x
model_path="pretrained/dfine_seg_s_coco.pt",
n_outputs=80, # COCO classes
input_width=640,
input_height=640,
conf_thresh=0.5,
enable_mask_head=True, # False for detection checkpoints
device="cuda", # cuda / mps / cpu
)
img = cv2.imread("path/to/image.jpg") # BGR
results = model(img) # [{"boxes", "scores", "labels", "masks"?}]
```
### Option 2 — Direct download with `huggingface_hub`
```python
from huggingface_hub import hf_hub_download
ckpt = hf_hub_download(
repo_id="ArgoSA/D-FINE-seg",
filename="dfine_seg_s_coco.pt",
)
# Then load with the official repo's Torch_model (see Option 1).
```
### Option 3 — Gradio demo
```bash
python -m demo.demo
```
## Training data
| Use case | Datasets used |
|---|---|
| COCO detection / segmentation pretraining | [COCO 2017](https://cocodataset.org/) |
| Objects365 → COCO checkpoints | [Objects365](https://www.objects365.org/) → COCO 2017 |
| Reported drone benchmarks | [VisDrone](https://github.com/VisDrone/VisDrone-Dataset) (~6.5k train / ~550 val / ~1.6k test-dev) |
| Reported waste benchmarks | [TACO](http://tacodataset.org/) (1500 images, 59 effective classes, 86/14 batch-ID split) |
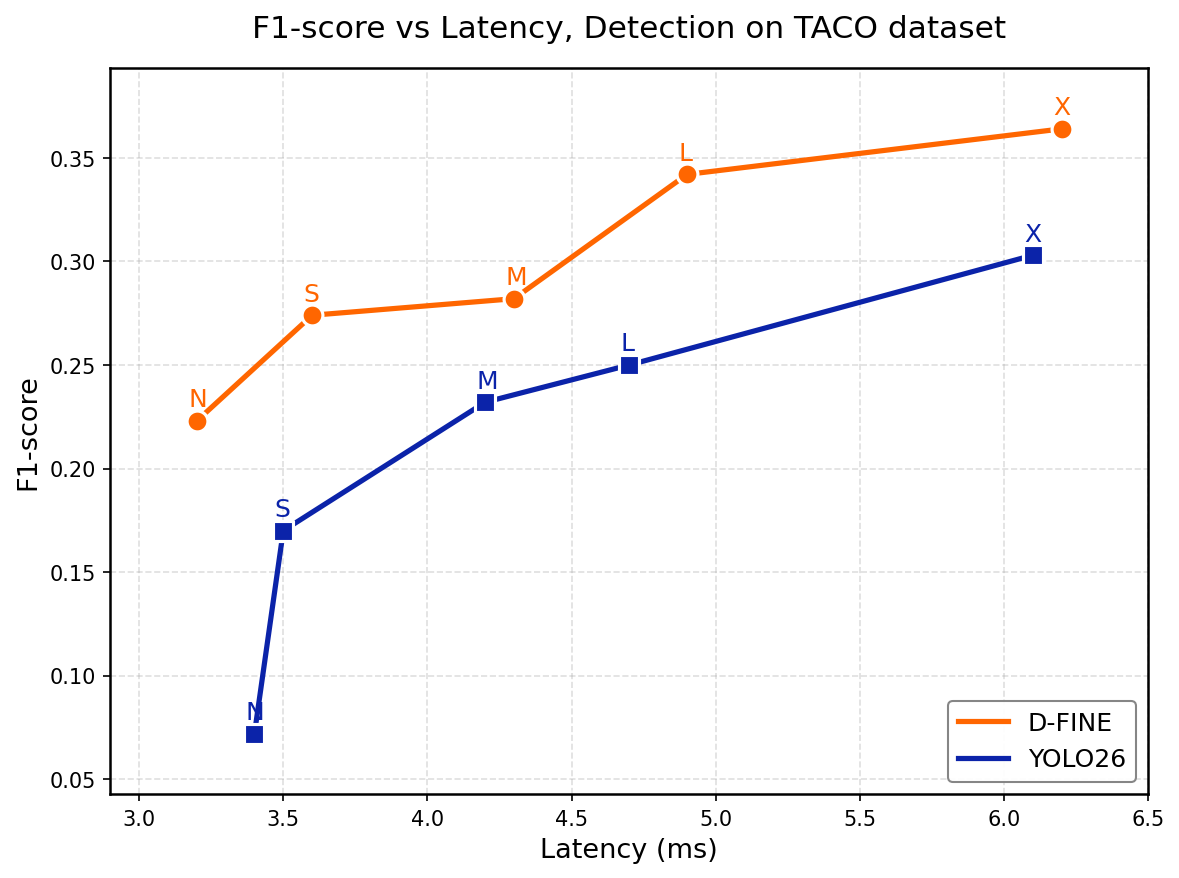
## Benchmarks
End-to-end latency (preprocessing + forward + postprocessing), RTX 5070 Ti, TensorRT FP16,
640×640, batch size 1. F1-score at IoU 0.5.
### VisDrone — object detection (test-dev)
| Model | F1 | IoU | Latency (ms) |
|---|---|---|---|
| **D-FINE N** | **0.531** | 0.288 | 1.6 |
| YOLO26 N | 0.455 | 0.226 | 2.8 |
| **D-FINE S** | **0.584** | 0.332 | 2.1 |
| YOLO26 S | 0.510 | 0.264 | 3.1 |
| **D-FINE M** | **0.605** | 0.351 | 2.7 |
| YOLO26 M | 0.562 | 0.301 | 3.6 |
| **D-FINE L** | **0.606** | 0.351 | 3.3 |
| YOLO26 L | 0.568 | 0.308 | 4.1 |
| **D-FINE X** | **0.611** | 0.354 | 4.5 |
| YOLO26 X | 0.584 | 0.319 | 5.3 |
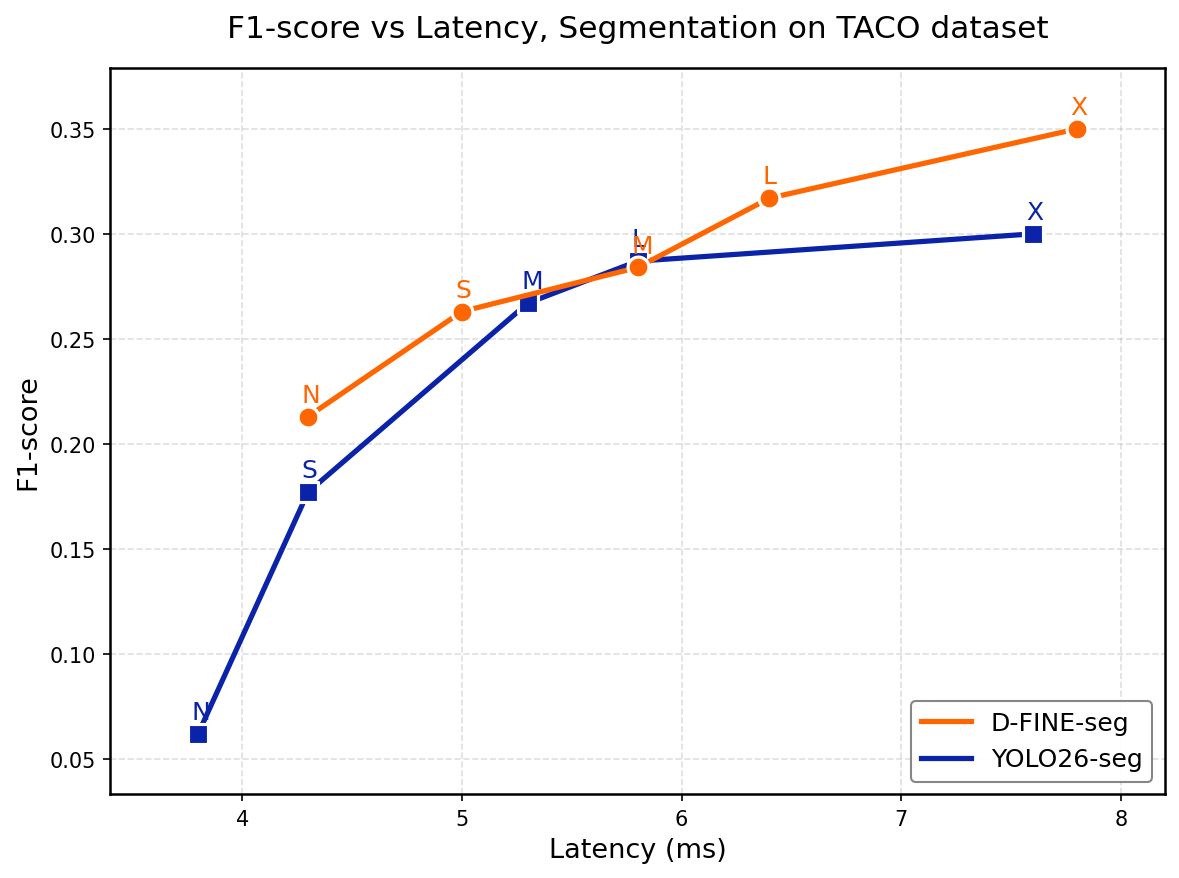
### TACO — instance segmentation
| Model | F1 | IoU | Latency (ms) |
|---|---|---|---|
| **D-FINE-seg N** | **0.231** | 0.106 | 3.2 |
| YOLO26-seg N | 0.062 | 0.027 | 3.8 |
| **D-FINE-seg S** | **0.281** | 0.134 | 3.7 |
| YOLO26-seg S | 0.177 | 0.080 | 4.3 |
| **D-FINE-seg M** | **0.296** | 0.140 | 4.5 |
| YOLO26-seg M | 0.267 | 0.128 | 5.3 |
| **D-FINE-seg L** | **0.342** | 0.167 | 5.0 |
| YOLO26-seg L | 0.287 | 0.137 | 5.8 |
| **D-FINE-seg X** | **0.380** | 0.190 | 6.3 |
| YOLO26-seg X | 0.300 | 0.146 | 7.6 |
See the [GitHub README](https://github.com/ArgoHA/D-FINE-seg#benchmarks) for full TACO detection
results, COCO-style mask/box AP, and cross-format (Torch/TRT/OpenVINO/CoreML) comparisons on
desktop, edge (Intel N150), and Apple Silicon.
## Intended use and limitations
**Intended use.** General-purpose object detection and instance segmentation, particularly
when (a) low end-to-end latency matters and (b) the deployment target is GPU (TensorRT),
CPU/iGPU (OpenVINO), or Apple Silicon (CoreML).
**Out of scope.**
- Safety-critical perception (autonomous driving, medical) without independent validation.
- Strong domain shift away from the pretraining distribution. The COCO-pretrained checkpoints
are an init; expect to fine-tune on your own data for non-COCO classes.
- Real-time deployment without first re-exporting the TensorRT engine on the target GPU
(TRT engines are GPU-specific).
**Known limitations.**
- Mosaic augmentation is not recommended for the segmentation task; lower
`mosaic_augs.mosaic_prob` toward 0 if masks look wrong.
- INT8 quantization shows a noticeable F1 drop on segmentation; FP16 is the recommended
latency/accuracy trade-off for both GPU and CPU.
## Citation
```bibtex
@article{saakyan2026dfineseg,
title = {D-FINE-seg: Object Detection and Instance Segmentation Framework with Multi-Backend Deployment},
author = {Saakyan, Argo and Solntsev, Dmitry},
journal = {arXiv preprint arXiv:2602.23043},
year = {2026},
eprint = {2602.23043}
}
@misc{peng2024dfine,
title = {D-FINE: Redefine Regression Task in DETRs as Fine-grained Distribution Refinement},
author = {Yansong Peng and Hebei Li and Peixi Wu and Yueyi Zhang and Xiaoyan Sun and Feng Wu},
year = {2024},
eprint = {2410.13842},
archivePrefix = {arXiv},
primaryClass = {cs.CV}
}
```
## Acknowledgements
Detection core based on [D-FINE](https://github.com/Peterande/D-FINE) (Peng et al., 2024).
Mask head design follows [Mask DINO](https://arxiv.org/abs/2206.02777). Benchmarks use
[VisDrone](https://github.com/VisDrone/VisDrone-Dataset) and [TACO](http://tacodataset.org/).